
{kind=link}
Some interesting news: Japan’s Space Agency has confirmed that its historic Smart Lander for Investigating Moon (SLIM) touched down last week almost precisely where intended.
The catch? SLIM did so upside-down.
JAXA, Japan’s space agency, acknowledged the topsy-turvy situation thanks to images from a pair of autonomous probes dispatched by SLIM just before landing. Despite the lander’s unfortunate position, JAXA project manager Shinichiro Saki declared the endeavor a “perfect score.”
“The fact that something we designed traveled all the way to the moon and captured that image. I was nearly knocked off my feet when I saw it,” he told the Associated Press on January 25. “We have demonstrated that we can land precisely where we want to. We have opened the door to a new era.”
[Related: Japan makes history with its first unmanned moon landing.]
Japan is now the fifth nation to reach the moon’s surface, with its achievement standing out thanks to its precision. Prior lunar landers aimed for zones as large as six miles wide, while SLIM earned its nickname “Moon Sniper” by delivering much greater accuracy. After several days of analysis, JAXA confirmed that the craft landed just 180 feet from its already impressive 330-feet-wide target—easily within the engineers’ hopes. SLIM now sits close to the Shioli crater on the moon’s near side.
However, during the descent, officials verified that the lander’s main engines malfunctioned around 162 feet above the surface. This loss of thrust resulted in a slightly rougher touchdown than planned, likely affecting its current inverted position. Due to SLIM’s current perpetual handstand, its solar panels are directed in the wrong position. Without any reliable access to the sun’s energy, SLIM is essentially powerless, at least for now. JAXA officials believe there may still be a chance for their lander to reboot in a few days when the moon re-enters its daytime orbit.
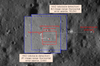 Lunar topography captured by the Indian spacecraft Chandrayaan-2, overlaid with images acquired by the SLIM navigation camera during the HV2 (second hovering) at an altitude of about 50m. The two blue frames are images acquired during the obstacle detection at HV2. As the spacecraft subsequently enters the obstacle avoidance operation, the performance of the pinpoint landing is evaluated based on the positional accuracy at this point. The positional accuracy at the time of the first and second obstacle detection was respectively about 3 – 4m and 10m. Note that it is highly likely that the main engine was already affected by the loss of function when the second obstacle detection occurred. The SLIM footprint in the red frame is the safe landing zone set autonomously by SLIM based on the obstacle detection during the HV2. Credit: Chandrayaan-2:ISRO/SLIM:JAXA
Lunar topography captured by the Indian spacecraft Chandrayaan-2, overlaid with images acquired by the SLIM navigation camera during the HV2 (second hovering) at an altitude of about 50m. The two blue frames are images acquired during the obstacle detection at HV2. As the spacecraft subsequently enters the obstacle avoidance operation, the performance of the pinpoint landing is evaluated based on the positional accuracy at this point. The positional accuracy at the time of the first and second obstacle detection was respectively about 3 – 4m and 10m. Note that it is highly likely that the main engine was already affected by the loss of function when the second obstacle detection occurred. The SLIM footprint in the red frame is the safe landing zone set autonomously by SLIM based on the obstacle detection during the HV2. Credit: Chandrayaan-2:ISRO/SLIM:JAXA
Even if SLIM must take an extended, well-deserved nap, its mission has already offered researchers an initial set of data. The lander’s two tiny drones, LEV-1 and LEV-2,